 Intelligent Design
Intelligent Design
 Life Sciences
Life Sciences
Ants Do Trigonometry: A Problem for Darwinism

Editor’s note: The following is an excerpt from the newly released book, Animal Algorithms: Evolution and the Mysterious Origin of Ingenious Instincts, from Discovery Institute Press. Don’t miss the upcoming webinar with Eric Cassell and Casey Luskin, Thursday, December 9, from 4 to 5:30 Pacific time. Register here.
As we have seen, a wide variety of animal navigation and migration patterns strongly suggest complex programmed behaviors. The migration and navigation strategies used by most animals are far more sophisticated than initially supposed when scientists first started studying them. The more scientists learn about them, the more complex they appear in many animals.
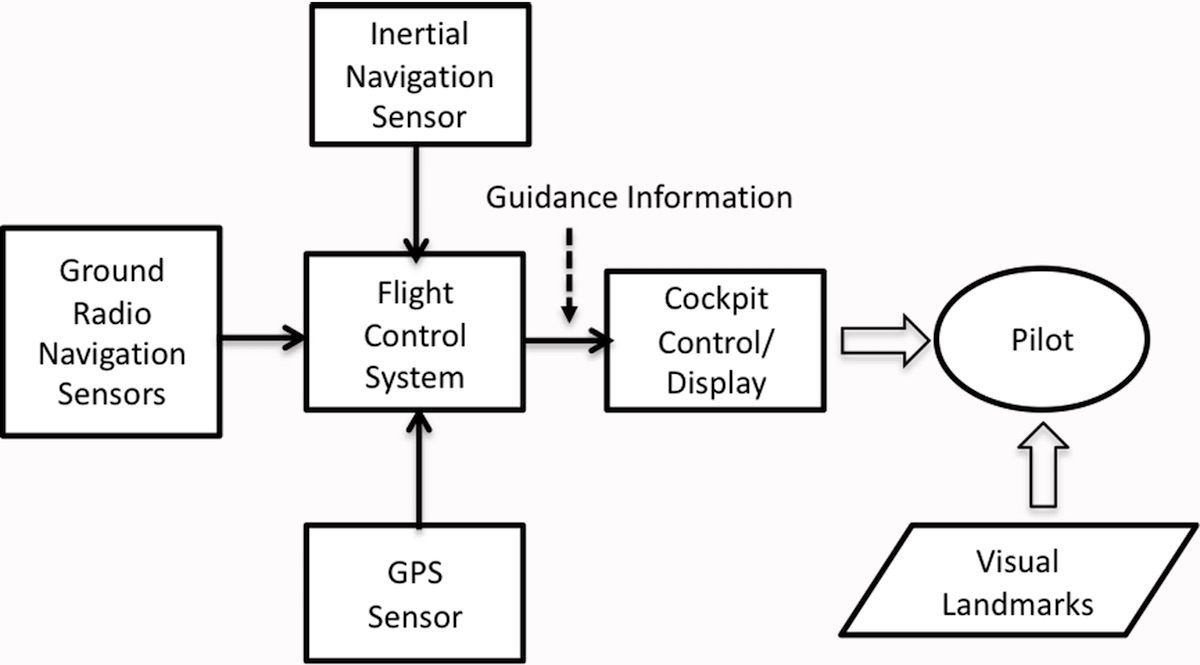
One way of demonstrating the level of engineering involved in these behaviors is by examining modern aircraft navigation systems. As shown in Figure 3.4, aircraft navigation systems use multiple redundant sensors (inertial, GPS, ground-based systems) along with other essential components.
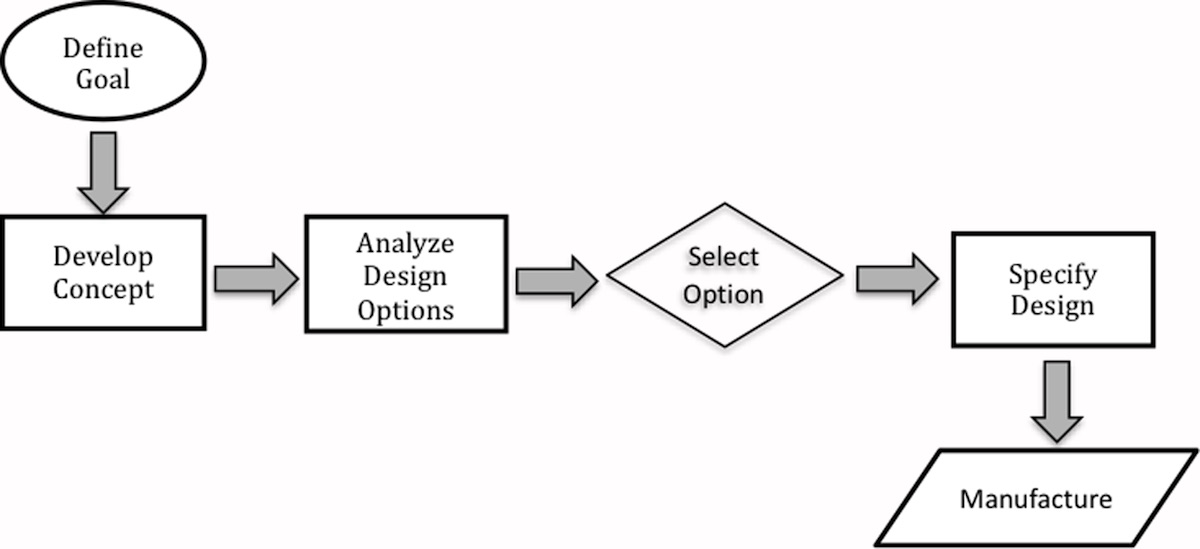
The Figure 3.4 illustration is, of course, a gross oversimplification. Having been personally involved in the engineering design of several systems, including aircraft navigation systems, I can attest that a structured engineering process is essential. The process must be top-down, where the overall concept must first be defined, as illustrated in Figure 3.5.
The process is as follows. The first step is to define the overall goal, including the purpose of the system. The second step is to develop a concept for implementing the system including the primary functions. Next is performing an analysis of potential design options. This includes assessing the options and evaluating the trade-offs, which for man-made systems include performance, complexity, and cost. Once a design option is chosen the next step is to define the specific requirements. Following that, the system can be manufactured.
Top-Down and Structured, but Why?
There are numerous reasons why this process must be top-down and structured. One is that since it is a complex system there are a lot of interdependencies, and therefore the design requirements must take this into account to ensure the components and operation function coherently. If all of the functions are not integrated correctly, system performance is significantly degraded.
The overall design of aircraft navigation systems requires thousands of hours of design work and development by engineers. The goal is a system that provides the optimum navigation information to the pilots by selecting the navigation source that provides the best performance for specific phases of flight — takeoff, en route, oceanic, airport terminal area, approach, and landing. The functions include the various sensors that provide this information, each of which is itself extremely complex.
As with all modern systems, it includes a combination of hardware (radio receivers, computer processors, cockpit displays) and software containing the computer algorithms for processing aircraft position data, navigation selection logic, map and route information, and display interface. All navigation methods require an integrated and coherent combination of physical elements, programmed algorithms, and other related information. The same is true for all migrating animals.
How the Elements Interact
Referring to Figure 2.2 regarding animal navigation systems, recall how all of these elements interact. Or to take one of the specific examples from above, we see this in desert ants (Figure 3.1). While the sensors, brain, algorithm, and physiology can be viewed as separate subsystems, they must work as an integrated system. Recall that desert ants employ three methods of navigation. Notice the similarity to aircraft navigation systems in Figure 3.4. The odometer and polarized light compass in desert ants are the information sources for path integration, while landmarks are the other information source. The central control function uses this information, in addition to the cues available from external conditions, to make a programmed decision of which source to use and to compute the correct navigation route. As we can see from all of this, the control function is a complex algorithm.
And it only gets more complicated. Referring again to Figure 3.3, the information defining these elements likely resides in different parts of the genome. Further, the information defining these elements is of a very different nature. For example, genes that control physiology bear no relationship to genes that define navigation or migration algorithms. Even the genes that determine sensor physiology (compass sensors, etc.) are very different from genes that determine migratory physiology (flight characteristics, etc.). All told, the development of navigation and migration behaviors requires the independent origin of the physical traits and information necessary for five separate groups of genes and other genetic information in the genome. As discussed above, the likelihood of obtaining even a few coordinated genetic changes is very low. The likelihood of obtaining an unknown (but likely large) number of coordinated genetic changes in five different parts of the genome is extremely improbable. Also required is the development of novel traits (of which there are numerous related to navigation and migration), which will be discussed in Chapter 4.
Two Incidents
I wrote an initial draft of this section shortly after there were two incidents in the news where commercial aircraft landed at airports that were not the intended destination. This is an example of pilots either failing to refer to their alternate navigation systems, or actual failure of the system. In either case, the incidents illustrate how crucial it is to have backup navigation strategies, and how challenging it is to program systems that consistently work properly. It is a fundamental concept in engineering that when the availability and reliability of a system are critical, then it’s best to design a backup system. A given cue may not be available at certain times, and at other times it may give ambiguous information. Having an alternate source of information can also help detect erroneous cues. We find this rule of thumb followed in desert ants and in many other migratory creatures.
Those who program computer algorithms for a living are especially well situated to appreciate just how complex an algorithm would need to be to function as well as the desert ant’s navigational algorithm. In this case, the algorithm consists of several logical decisions based on the information detected. Once the algorithm makes a decision concerning which source of navigation to use based on incoming data and environmental conditions, the control function then must compute the course. In some instances the course is computed based on combining the information from two navigation methods. When the ant is using the path integrator it keeps track of its movement through the odometer and the angular movements determined by the compass, which are both stored in memory. It then can compute the direct path to its home nest. This is a complex process that involves trigonometry.
When Ants Do Trigonometry
While we can write a reasonably simple segment of computer code to do this computation, in this case it must be programmed into the ant’s brain and integrated with the many other essential elements of the navigation algorithm. The question is twofold: (1) How can a trigonometric mathematical computation be programmed into the brain of an ant through a neo-Darwinian process of genetic mutation and natural selection? The programming, keep in mind, likely involves a neural circuit, and one of considerable sophistication. (2) How could a neo-Darwinian process manage to do so while simultaneously building other essential subsystems of the larger integrated navigation system? The trigonometric calculation alone would seem to be difficult to evolve in a stepwise manner, but without these other subsystems in place, the most beautiful algorithm in the world for calculating a trigonometric mathematical computation is useless to the ant, and therefore not available for being seized upon and preserved by natural selection. This raises the chicken-or-egg problem: Which evolved first — the physical systems or the behavior algorithms?
Serial gradualistic evolution does not seem plausible, as each characteristic by itself is not useful. On the other hand, simultaneous evolution of all of the physical characteristics and behaviors is not plausible due to its extreme improbability.